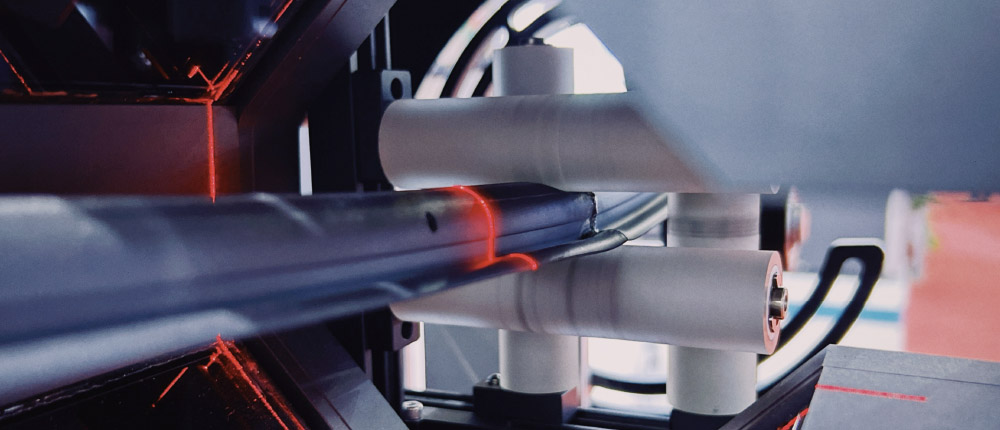





什么是3D视觉系统
以前我们所说的机器视觉,通常是指2D的视觉系统,即通过摄像头拍到一个平面的照片,然后通过图像分析或比对来识别物体,能看到物体一个平面上特征,可用于缺失/存在检测、离散对象分析、图案对齐、条形码和光学字符识别,以及基于边缘检测的各种二维几何分析。
由于2D视觉无法获得物体的空间坐标信息,所以不支持与形状相关的测量,诸如物体平面度、表面角度、体积或者区分相同颜色的物体之类的特征,或者在具有接触侧的物体位置之间进行区分,而且2D视觉测量物体的对比度,这意味着依赖于光照和颜色/灰度变化,测量精度易受变量照明条件的影响。
因此,随着现在对精确度和自动化的要求越来越高,3D机器视觉越来越受欢迎,在许多“痛点型应用场景”中大显身手,成为当前“智”造业最炙手可热的技术之一。

视觉引导的时间是多少秒
视觉引导时间通常是3-6秒。
视觉引导时间是指车辆以当前速度到达最远能够看清物体的时间。这个时间范围是根据一般驾驶员的视觉能力来确定的,通常在3到6秒之间。这个时间段内,驾驶员能够看到前方的最远距离,并据此做出相应的驾驶决策或反应。然而,这个时间范围并不是固定的,因为不同驾驶员的视觉能力和反应时间可能会有所不同。
视觉引导时间的概念对于驾驶安全至关重要,因为它直接关系到驾驶员能够及时发现并应对前方潜在危险的能力。
了解视觉引导时间的概念有助于驾驶员更好地规划自己的驾驶行为,比如保持合适的车距、避免在视线不佳的情况下超车等,从而提高行车安全。
此外,一些防御性驾驶技巧也可以帮助驾驶员延长自己的视觉引导时间,比如通过提高注意力、使用车速和距离的适当比例来保持安全距离等。

新手司机该牢记自己的使命,克服“从众心理”。
技巧一,最容易控制的是前方空间,坚持做到15秒视觉引导时间,4秒或更长的跟车距离,有人夹塞时不气恼,不愤怒,继续按你的意图营造空间。
技巧二,利用你在观察外层空间是寻找到的“阻力最小车道”,适当的时间变道进入。
技巧三,尽量远离最危险区域,如一般公路上的行人和非机动车群,尽量保持一侧的内层空间不被占用。
技巧四,鼓励后面的车超过去,尤其是攻击性车辆。
技巧五,避免“并驾齐驱”,超车时或被超车时避免“三车一线”。
并驾齐驱:指两辆车以上同向并排行驶超过去30秒。
危害,损人不利己,自己没有一侧的内层空间,慢速时阻塞交通,易引发其他驾驶员的愤怒,正确的方式是:为自己留下空间;为别人留下出口。
“三车一线”指超车或被超车时有三辆或以上车辆在同一直线上。
危害:因超车时速度快,又没有两侧的内层空间,极易发生危险
技巧六,十字路口临时停车时,若停在第一位,离停车线2—3米左右的距离,以看见停车线为宜。
技巧七,若停在其他车辆的后面,以驾驶员能看到前车的后轮接地点为宜,此时,起动时应比前车慢一拍启动{1——2秒},会更有效地营造前方空间。
技巧八,除非万不得已,永远不要行驶在车阵中,
车阵的形成:交通信号灯{城市},道路瓶颈,并驾齐驱。
对策:或快速谨慎地通过,或匀速放松地远随。
技巧九,永远在你的车道中间行驶,不可靠一侧车道线太近,更不可开飞机——骑线驾驶。
倒车安全:
1、倒车时间占驾驶时间/距离的百分比
2、原因:不必要的倒车,盲区大,车辆设计,无足够的训练,无足够的信息。
3、停车前的原则:最好不倒车,寻找合适的停车位,避免开时倒车。
4、不得不倒时的原则:先查后倒,全面查看倒车范围内的潜在风险;其他车辆、人员等有无可能在你倒车时,进入你的倒车区域或请人指挥,在大型车辆时,一定要请助手帮忙指挥,倒车前与助手约定好语言、手势等,倒车时确保你的助手在你的视野里,否则立即停车。
5、设置标志:在倒车区域里设置安全锥,以作警示。
6、不得不倒时的原则:尽量短倒,倒出以能前进即可。
7、倒车三原则:最好不倒,先查后倒,尽量短倒。这六个要素提供了一个安全驾驶行为框架,可以在任何情况下加以变通运用。了解和掌握这六个驾车要素,并应用到实践操作,到最后自然会养成一个好的开车习惯,会成为优秀的安全驾驶人。
当前文章链接:https://www.oi-smart.com/exhibition/26.html
文章来源于:https://www.oi-smart.com/未经允许不得转载
 关注我们
关注我们 小客服微信
小客服微信